Want to know what the future looks like? A good place to start is with Georgia Tech’s star-studded research in robotics.
Want to know what the future looks like? A good place to start is with Georgia Tech’s star-studded research in robotics.
Gil Weinberg’s robotic prosthesis for drummers made news around the world. Ayanna Howard’s child-sized bot helps children with motor skills disabilities and brought the launch of startup company Zyrobotics. Andrea Thomaz’s Socially Intelligent Machines Lab – home to Simon, a near-celebrity droid – has deepened understanding of human-robot interactions.
But there’s another dimension of robotics exploration at Tech that’s less known but becoming every bit as impressive. It’s the field of control, which ensures that robots act and react predictably.
More precisely, control represents the application of control theory, the mathematical underpinnings that guide robot actions and decision-making in situations or dynamic environments. A robot walking across a floor, for example, may seem like an unremarkable event. But the decision and control system that informs this simple action is quite complex – even more so if a small object is placed in the robot’s way.
If you scan the higher education landscape, you’ll find some of the usual suspects leading the way in controls research. MIT’s Laboratory for Information and Decision Systems (LIDS) and CalTech’s vaunted Division of Control and Dynamical Systems are list-topping laboratories.
Leaders in the World of Control Robotics
If what’s happened in recent years is any indication, Georgia Tech’s name has been added to that upper echelon. Tech has been building one of the strongest, not to mention largest, research groups in control in the country. And the work they’re doing is beginning to capture the attention of others.
A luncheon at Chicago’s Palmer House in early July provided two examples of this rising prominence. At the event, a pair of Georgia Tech faculty – Magnus Egerstedt and Aaron Ames, both researchers in controls – were presented with two of the five top awards bestowed by the American Automatic Control Council, a consortium of eight societies in the field.
Egerstedt’s receipt of the John R. Ragazzini Education Award certified his status as a thought leader in the field. His area of specialty is swarm robotics, a fascinating way of coordinating systems of many small robots. Each robot works on a task. Through sensors and communication, it is attuned only to what’s happening in its immediate environment; it receives no instruction from a single central decision maker. Hence, the challenge of a swarm: Its sheer size makes centralized command impossible, so its behavior and decision making must be pre-determined through algorithms.
Designing a robot swarm requires deep knowledge of the “swarm intelligence” principles found in nature, and indeed, the field was born through collaborations with biologists. Schools of fish, flocks of birds – even colonies of bacteria – all have lessons to impart to legions of robots that work individually toward a larger common goal.
“And it’s not just the anthills,” Egerstedt says. “Human societies are also distributed systems where individuals make decisions and communicate with neighbors to solve problems.” (Watch Egerstedt’s TedX talk on swarm robotics)
The thinking is that “with very simple individual rules, the robots in a swarm can be mobilized to accomplish significant tasks,” he adds. Perhaps they could be deployed in disaster relief situations or used to disarm an environmental hazard. It’s a young field, rife with possibilities, and Egerstedt has been instrumental in shaping it.
The same could be said someday about Aaron Ames, an associate professor in both the ME and ECE schools. A new recruit to Georgia Tech – he arrived in July from Texas A&M – Ames captured AACC’s Donald P. Eckman Award, which recognizes outstanding young engineers in automatic control. He is distinguished by more than being smart and young (35 this year); his work in bipedal locomotion control is advancing the field humanoid robots with the goal of translating these capabilities to prostheses, exoskeletons and wearable robots.
“Having a robot wash dishes is fine,” Ames says, “but when you put robots on people, it’s something completely different. For people who can’t walk, you’re giving them the chance to come out of the wheelchair – and walk.”
Mimicking Human Biomechanics
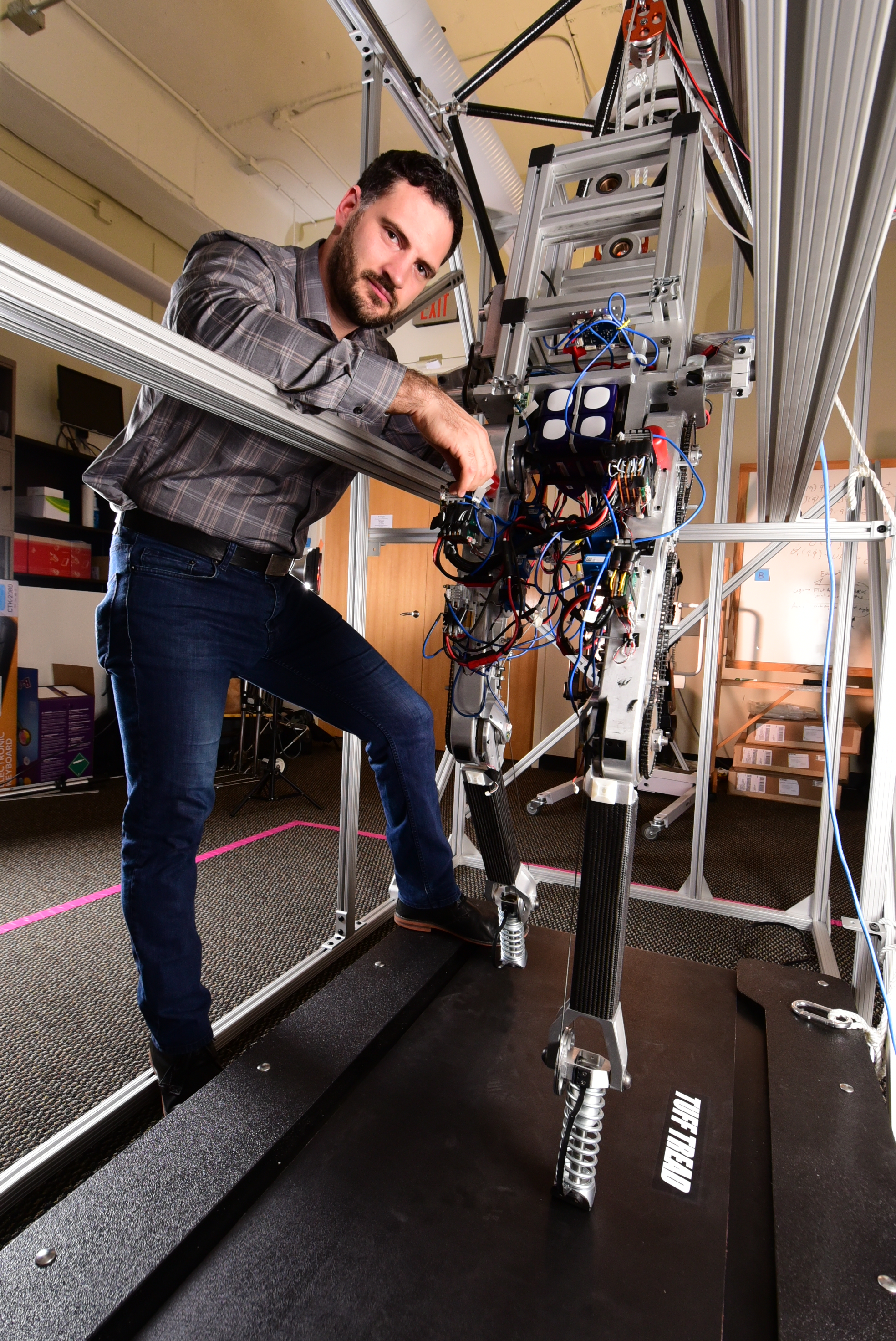
Ames heads the AMBER Lab, which he moved to Tech from Texas. The lab has built multiple robots with a walking style mirroring that in humans. It takes extraordinary effort and iteration not only to mimic human biomechanics, but also to make quick decisions after sensing something different in the environment – a buckle in the sidewalk, for instance.
“We’ve had millions of years of evolution to achieve this behavior of walking, yet the simplicity and elegance with which humans walk belies something we haven’t yet discovered,” which is how to replicate it in a machine, Ames says. (Watch a robot-walking demonstration from the AMBER lab)
Developing control methods to achieve walking on humanoid robots and wearable robots is ambitious enough. But Ames has a side goal: He would like to refine the dynamics of a robot so that it can outrun Olympic gold medalist sprinter Usain Bolt, hailed as the fastest human ever.
“I think we can do it in the next five years,” Ames says. “We’re designing a robot right now to do this. Our motors are fast and powerful enough to make a robot run 30 miles an hour. The technology is there, but we have to integrate the control.”
The awards given to Ames and Egerstedt reflect only the latest achievements among Georgia Tech faculty working in control, and both are quick to emphasize that other developments and colleagues are substantive evidence of Georgia Tech’s rising star in the field.
Tech's Robotics Stars
For example, Jeff Shamma, Julian T. Hightower Chair in Systems & Control in ECE (currently on leave), pioneered the use of game theory when designing controllers. Panagiotis Tsiotras, the College of Engineering Dean’s Professor in AE, leads a major multi-university research initiative on high-speed autonomous driving.
And then there’s the Decision and Control Laboratory, currently the locus for advancing knowledge of control theory across the Institute. Launched in 2008, DCL does a good job sharing developments in the field with students and faculty, but some recognized it could do more.
So Egerstedt and Eric Feron, a Professor in Aerospace Engineering, are leading an effort to have the Lab designated as one of Georgia Tech’s celebrated Interdisciplinary Research Centers. The move would formalize collaborations across all colleges at Georgia Tech and open the door to becoming a worldwide reference center for scholarship in control theory and dynamical systems – another milestone toward solidifying Georgia Tech’s reputation in a field that is rapidly changing.
“We have an amazing group of faculty in controls,” Egerstedt says. “We’ve gone from a good program to a top program, and now we have the opportunity to build a brand in this area for Georgia Tech.”
The contributions Georgia Tech makes to control and control theory will not only change the field but help shape the next generation of robotics in our lives. What lies beyond that is anyone’s guess.
An excellent definition of control and dynamical systems from a peer institution:
“At its simplest, control is achieved when a sensed quantity is used to modify the behavior of a system, as one does in everyday life, such as driving a car and walking. In technology, control is often achieved through computation and actuation, as in automotive controls or controlling a spacecraft. More formally, control makes use of algorithms and feedback in engineered systems, and is a means of ensuring robustness in an uncertain environment. Dynamical systems refers to the way systems change over time, such as the movement of your car, the dynamics of walking, or the dynamics of a molecule or of the solar system. More formally, it is the study of processes described by evolutionary equations such as ordinary and partial differential equations.” — California Institute of Technology
Additional Images

")
